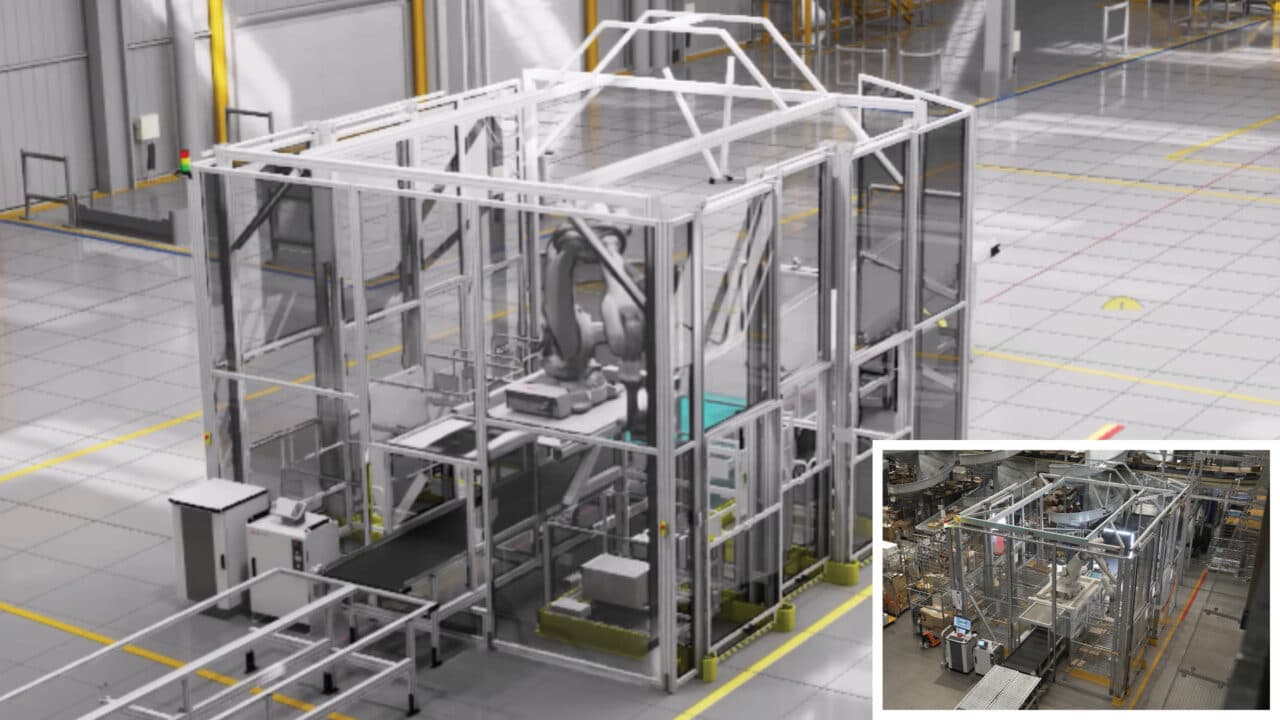
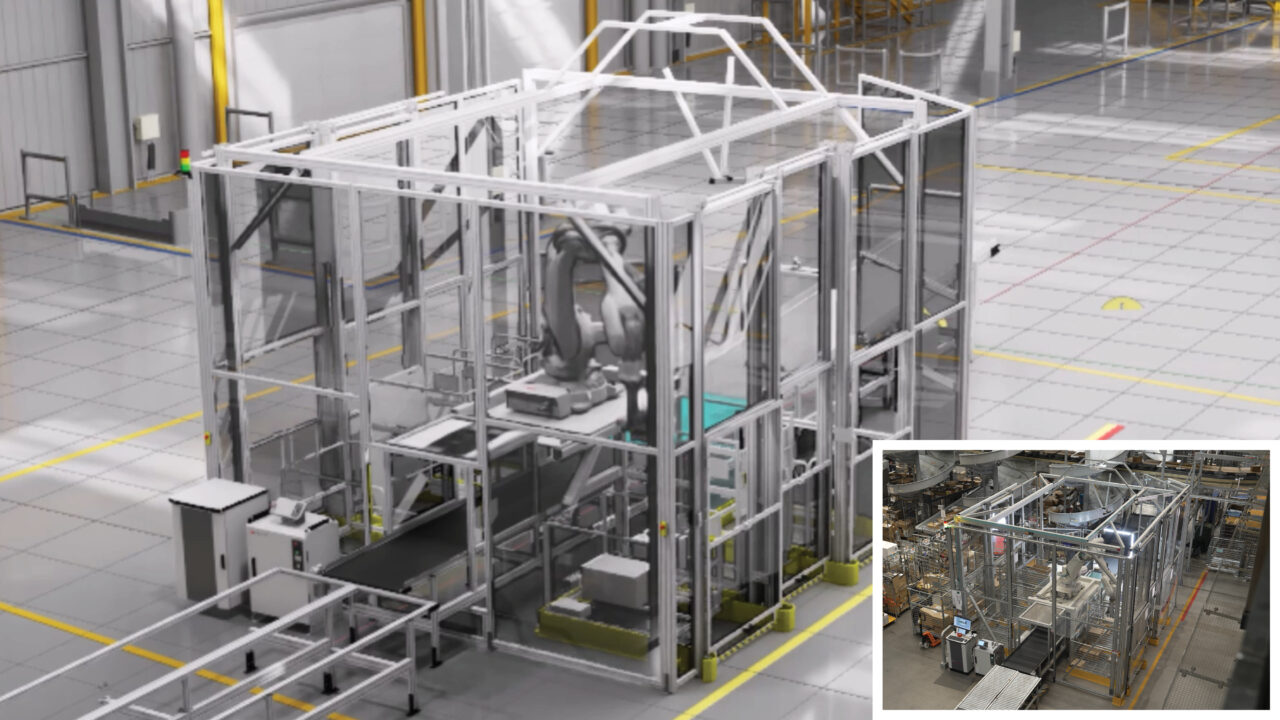
ABB가 3월 9일 NVIDIA Omniverse 기반 로봇 시뮬레이션 플랫폼 RobotStudio HyperReality를 발표했다. 2026년 하반기 구독형 출시 예정이며, GTC 2026(3월 16~19일, 산호세)에서 첫 라이브 데모가 진행된다.
핵심: 위치 오차 8~15mm → 0.5mm
기존 RobotStudio는 실제 IRC5/OmniCore 펌웨어를 그대로 돌리는 VirtualController가 강점이었지만, 위치 오차 8~15mm, 물리 시뮬레이션 정밀도 부족이 한계였다. 오프라인 프로그래밍 후 현장에서 재티칭이 필수였다.
HyperReality는 NVIDIA Omniverse의 물리 엔진과 렌더링 파이프라인을 통합해 이 격차를 줄였다.
| 항목 | 기존 RobotStudio | HyperReality |
|---|---|---|
| 시뮬-리얼 상관도 | 90~95% (비공식) | **99%** |
| 위치 오차 | 8~15mm | **~0.5mm** |
| 물리 시뮬레이션 | 기본 충돌·중력 | 재질·마찰·탄성 반영 |
| 렌더링 | 기본 3D | 포토리얼리스틱 (AI 합성 데이터 생성 가능) |
| 파일 포맷 | 독자 포맷 | **USD 내보내기** 지원 |
| 셋업·커미셔닝 | 기준 | **80% 단축** |
| 배포 비용 | 기준 | **40% 절감** |
0.5mm 오차는 전자부품 조립·정밀 용접에서 오프라인 프로그래밍 결과를 현장에 거의 그대로 적용할 수 있는 수준이다.
주요 기능
- 물리 기반 디지털 트윈: 로봇·센서·파트 전체를 재질 간 마찰·탄성까지 반영해 시뮬레이션한다.
- AI용 합성 이미지 생성: 포토리얼 렌더링으로 비전 모델 학습용 데이터를 생산한다. 실제 불량 샘플 수집 없이 다양한 조명·각도·불량 유형 조합이 가능하다.
- USD 내보내기: NVIDIA Isaac Sim 등 Omniverse 생태계와 데이터 호환.
- 동일 펌웨어 가상 컨트롤러: 기존 강점인 OmniCore/IRC5 펌웨어 기반 시뮬레이션 유지.
파일럿: 폭스콘, Workr
폭스콘은 소비자 전자기기 조립 라인의 정밀 금속 부품 핸들링에 적용 중이다. 세계 최대 EMS가 채택했다는 건 오프라인 프로그래밍 정밀도가 양산급이라는 방증이다.
Workr(캘리포니아)는 중소 제조사 대상 로봇 솔루션 기업으로, Omniverse 합성 데이터로 학습시킨 로봇을 프로그래밍 없이 배포하는 시연을 GTC에서 진행한다.
경쟁 구도
| 항목 | ABB HyperReality | Siemens Process Simulate | Fanuc ROBOGUIDE |
|---|---|---|---|
| 물리 엔진 | NVIDIA Omniverse | 자체 | 자체 |
| 멀티 벤더 | ABB 전용 | **멀티 벤더** | Fanuc 전용 |
| AI 합성 데이터 | 지원 | 제한적 | 미지원 |
| 시뮬-리얼 정밀도 | 99% (공식) | 비공개 | 비공개 |
| 가격 구조 | 구독형 | 수천만 원대 라이선스 | 패키지별 구매 |
Siemens는 멀티 벤더 셀 시뮬레이션에서 여전히 강자다. ABB는 물리 정밀도와 AI 파이프라인으로 차별화를 시도하고 있지만, ABB 로봇 전용이라는 한계는 명확하다. 멀티 벤더 라인에서는 별도 통합 시뮬레이터가 필요하다.
가격
구독료는 미공개. 기존 RobotStudio Basic(무료) / Premium(유료 구독) 체계에 HyperReality 티어가 추가되는 구조다. Omniverse 기반이므로 NVIDIA GPU 워크스테이션이 필수이고, 이는 별도 비용 요인이다.
AutoHano의 시선
ABB 로봇만 쓰는 라인이라면 꽤 매력적이다. 오프라인 프로그래밍 후 현장 재티칭이 거의 사라질 수 있는 0.5mm 오차는, 커미셔닝 시간을 실질적으로 줄여줄 수 있는 수치다. 다만 99% 정밀도는 ABB가 공개한 숫자일 뿐, 온도 변화·툴 마모·지그 공차가 섞인 양산 환경 실증은 아직 없다. GPU 비용에 구독료까지 합산한 TCO도 따져봐야 하고, NVIDIA 이름이 붙은 이상 싸지는 않을 거다. 멀티 벤더 라인이면 이것만으로는 부족하다.